Im trying to make a robot which follows a line. Line following will be done through IR sensors. But there is another part of the challenge where the robot is supposed to detect green and accordingly turn at intersections. Colour sensors and IR sensors were not able to detect green in a reliable way. So I want to use the openMV cam for detecting the greens and telling the arduino what to do when it sees an intersection.
Here are some pictures which describe what the robot is supposed to do when it detects an intersection.




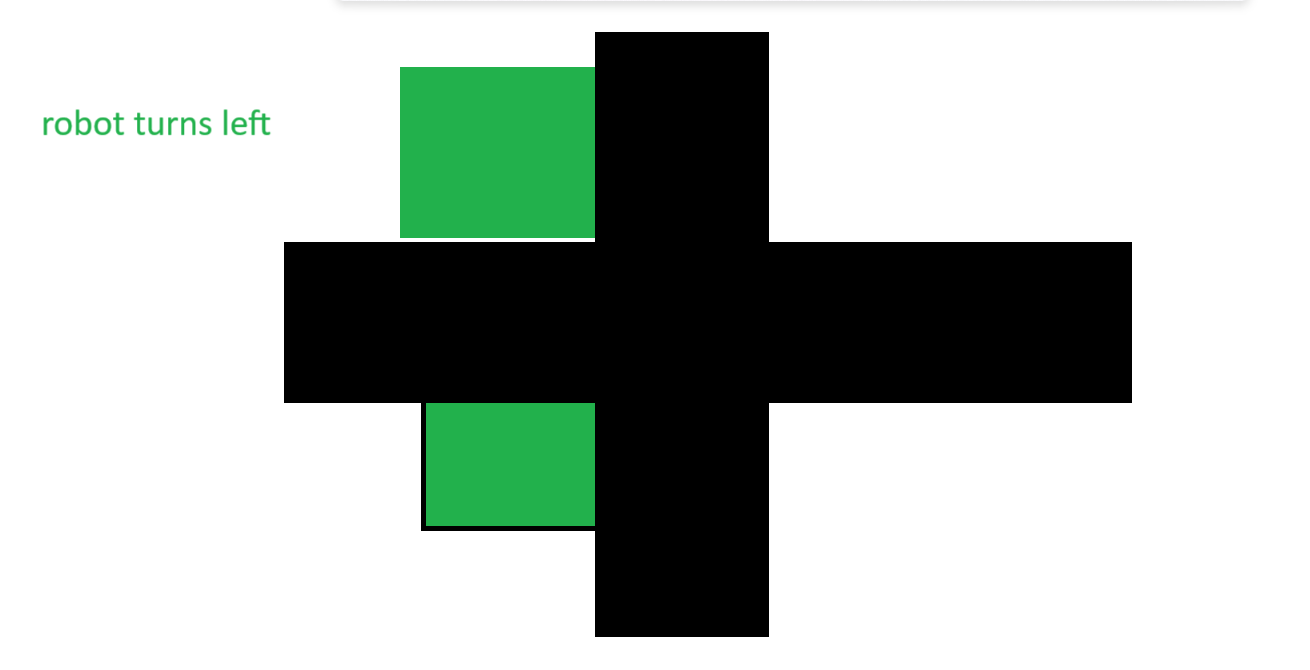
i hope these pictures make it clear. It ignores any green squares ahead if its there basically.
Can someone help me with this