Looking for advice on ball discrimination and ranging. Wanting to use the OpenMV H7 to find and qualify the color of the ball for the robot to acquire. I’m not sure if tensor flow or a if I should just do a color binary filter and look for circles. The robots will have rectangular bumpers of a similar color on their perimeter as the balls we are wanting to track. This in combination with the variability in lighting make me think that some machine learning would be the best solution, but the frame rate and H7 limitations become a concern.
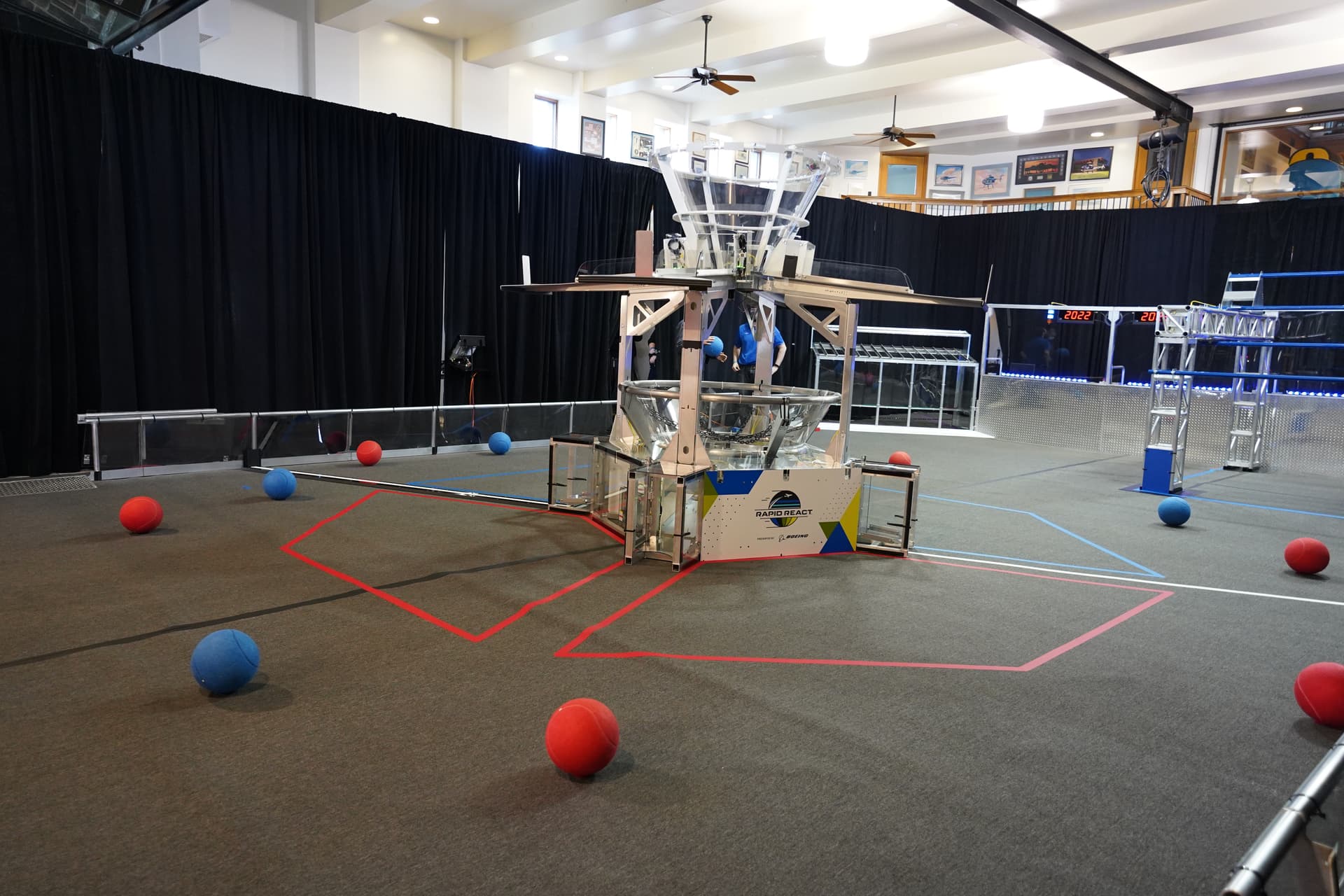
Attaching a pic with the field and the balls we need to find.
Thanks
Jim