am working on a project and going in circles on how to write the code. I am using open MV H7 camera to determine if an object is in the correct orientation when passing under the camera. The object is fruit with a seed on the end and attached to the body of the fruit, so the size is not entirely consistent. The correct orientation for my purpose is seed first, or else it is a fail. How can I do this? I was thinking about comparing the areas of each using multiple color blob detection, to say the area of the first “color blob” (seed) that comes into frame must be smaller than the area of the second “color blob”(body) that comes into frame. Is it possible to do this? What functions can I use? Any other ideas? I am getting the idea that this is somewhat niche and I cannot find something relevant for comparison even. I am very new to coding. Thank you in advance.
Hi, can you post a picture from the camera of the object? Right click on the IDE screen buffer when not streaming to save an image.
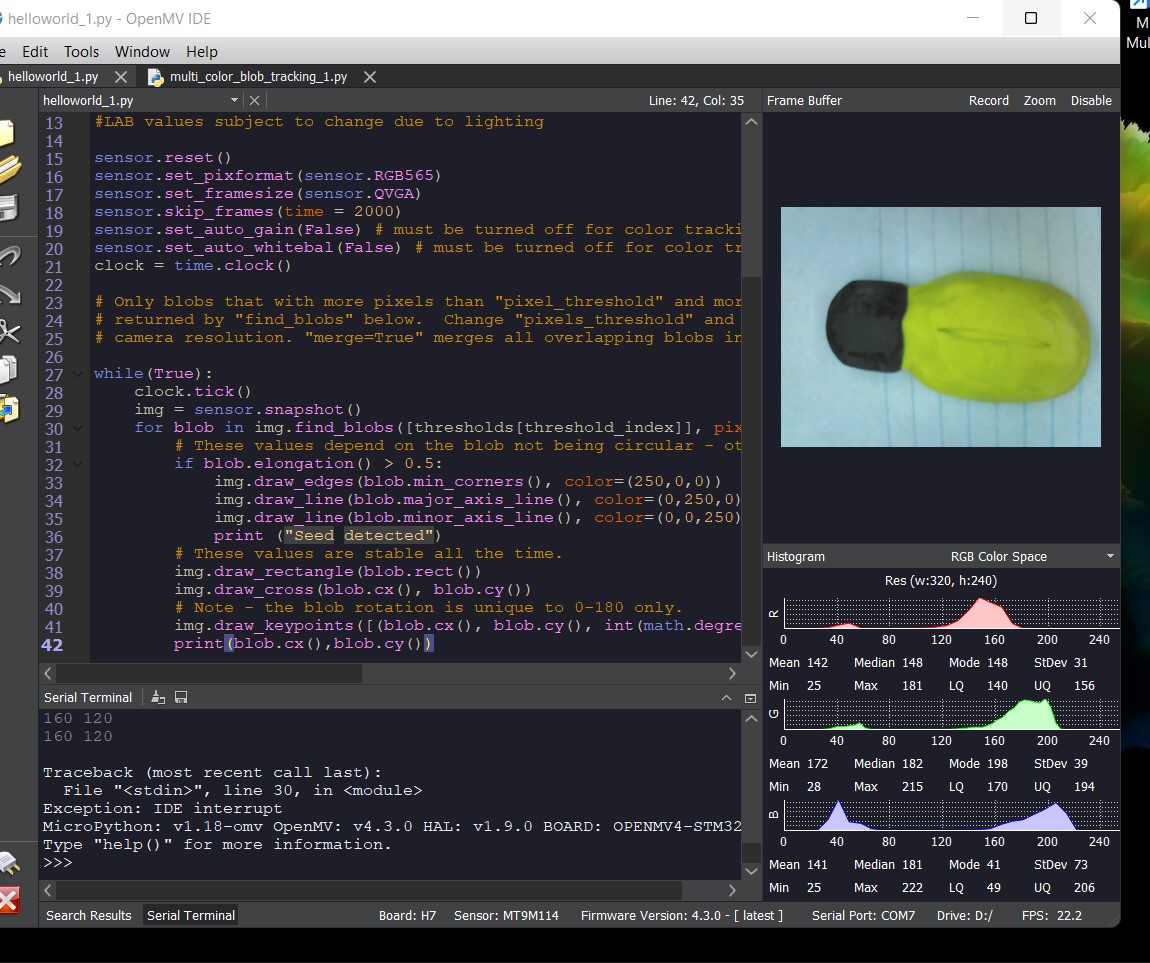
when the object is in this orientation, it should “pass” and blink green LED. All else will fail. Any ideas?
This is easy. Just track the black top part using color tracking and write a function to pass the object if the black part location is on the left side.
How you gonna trigger the camera to take snapshots; free running or external trigger;